Simulierte Marsmission
Astronaut steuert Roboterteam bei München aus 400 Kilometern Höhe
28.07.2025 – 13:30 UhrLesedauer: 2 Min.


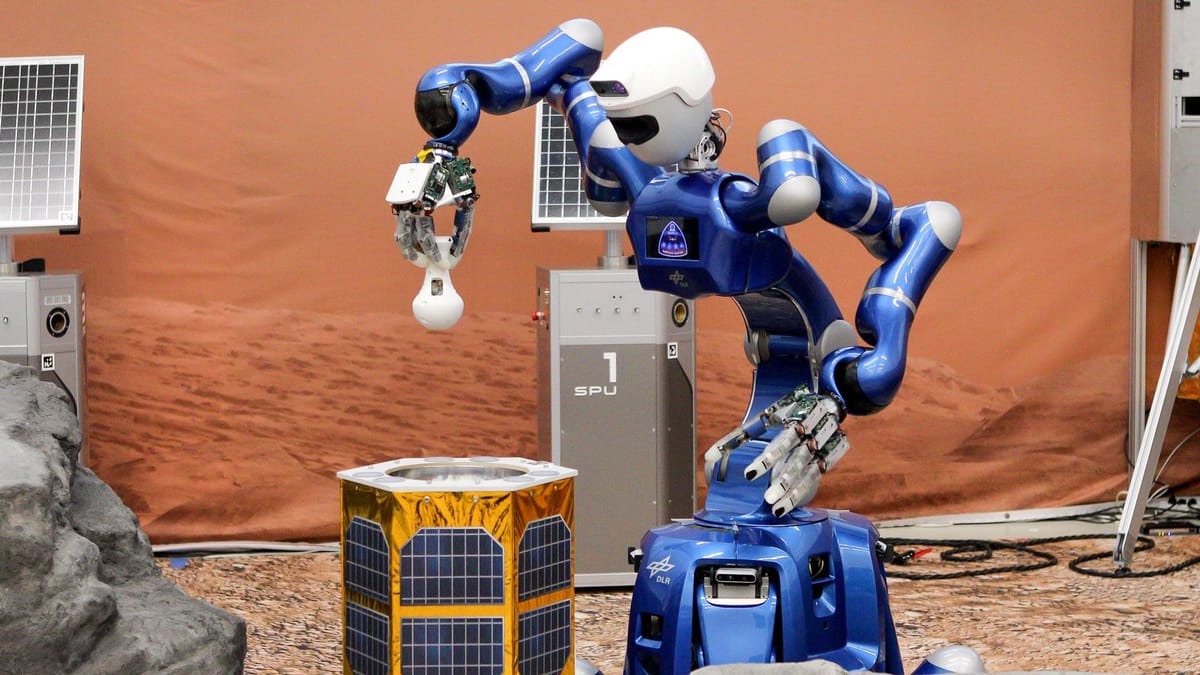
DLR-Roboter „Rollin’ Justin“ holt Probenbehälter ab: Die Handlungen des Gefährts wurden aus dem All vom NASA-Astronauten Jonny Kim gesteuert. (Quelle: Erlend Hellerslien /PR-bilder)
Ein NASA-Astronaut steuert von der ISS aus einen Roboter auf einer simulierten Marslandschaft bei München. Nach einem Zwischenfall muss er „Bert“ sogar das Gehen mit drei Beinen beibringen.
NASA-Astronaut Jonny Kim hat am 24. Juli 2025 von der Internationalen Raumstation ISS aus ein Team von vier Robotern auf der Erde gesteuert. Das Experiment fand auf dem simulierten Mars-Gelände des Deutschen Zentrums für Luft- und Raumfahrt (DLR) in Oberpfaffenhofen bei München statt.
Prof. Alin Albu-Schäffer, Direktor des DLR-Instituts für Robotik und Mechatronik, sprach von einem Meilenstein in der Mensch-Roboter-Zusammenarbeit im All. Das Team habe bewiesen, dass komplexe robotische Missionen aus der Ferne steuerbar seien.
Die Roboter bewegten sich selbstständig über das Gelände und sammelten Gesteinsproben. Kim steuerte sie einzeln oder im Verbund – teilweise manuell, teilweise autonom.
Zum Einsatz kamen der humanoide DLR-Roboter „Rollin‘ Justin“, der ESA-Rover Interact sowie die vierbeinigen Roboter Bert vom DLR und Spot von der ESA.
Eine besondere Herausforderung stellte ein simulierter Defekt dar: Der vierbeinige Roboter Bert hatte sich „verletzt“ – eines seiner Beine war blockiert. Um den Roboter dennoch einsatzfähig zu machen, ließ NASA-Astronaut Kim ihn verschiedene Gangarten mit drei Beinen ausprobieren.
Mithilfe einer speziellen Lernmethode bewertete der Roboter bei jedem Gehversuch seine Bewegungsfähigkeit – so lange, bis der Roboter einen stabilen Dreibein-Gang entwickelte. Anschließend konnte Bert seine Aufgabe wie geplant fortsetzen und die Höhle erkunden.
Unterstützt wurde Kim von einem speziell entwickelten KI-Chatbot. Der digitale Helfer beantwortete Fragen zur Steuerung der Roboter – eine Technik, die unter anderem bei künftigen Marsmissionen nützlich sein könnte, wenn die Funkverbindung zur Erde nur mit einer Verzögerung von bis zu 40 Minuten Verzögerung möglich ist.