DruckenTeilen
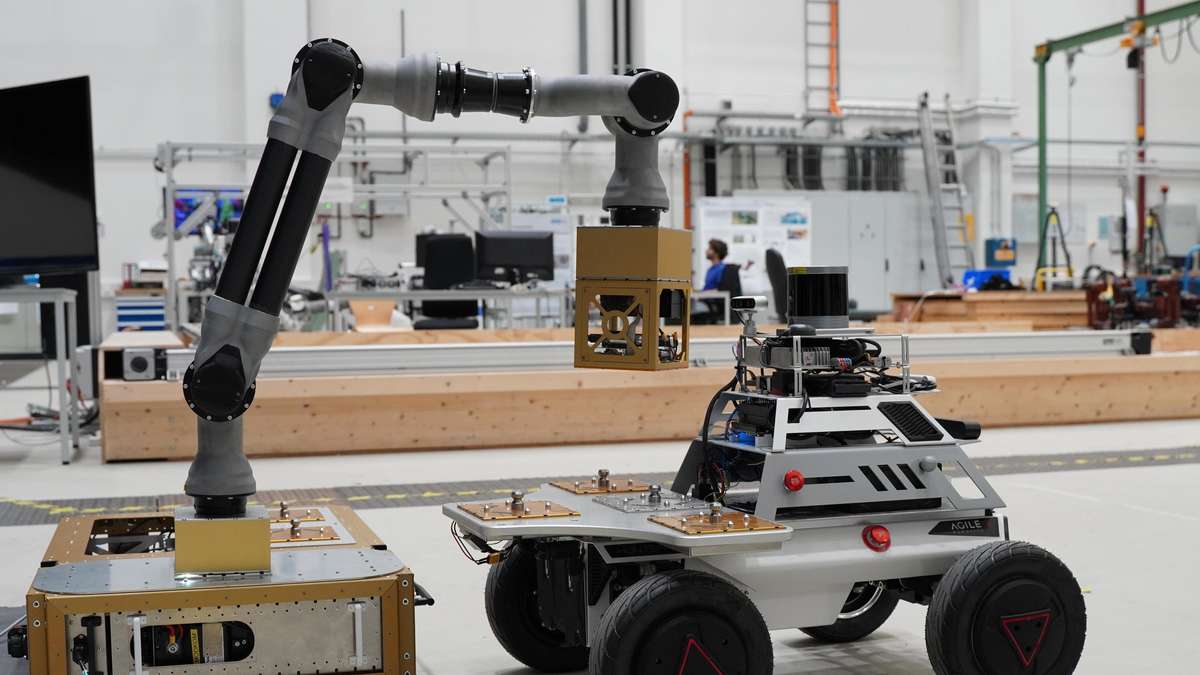
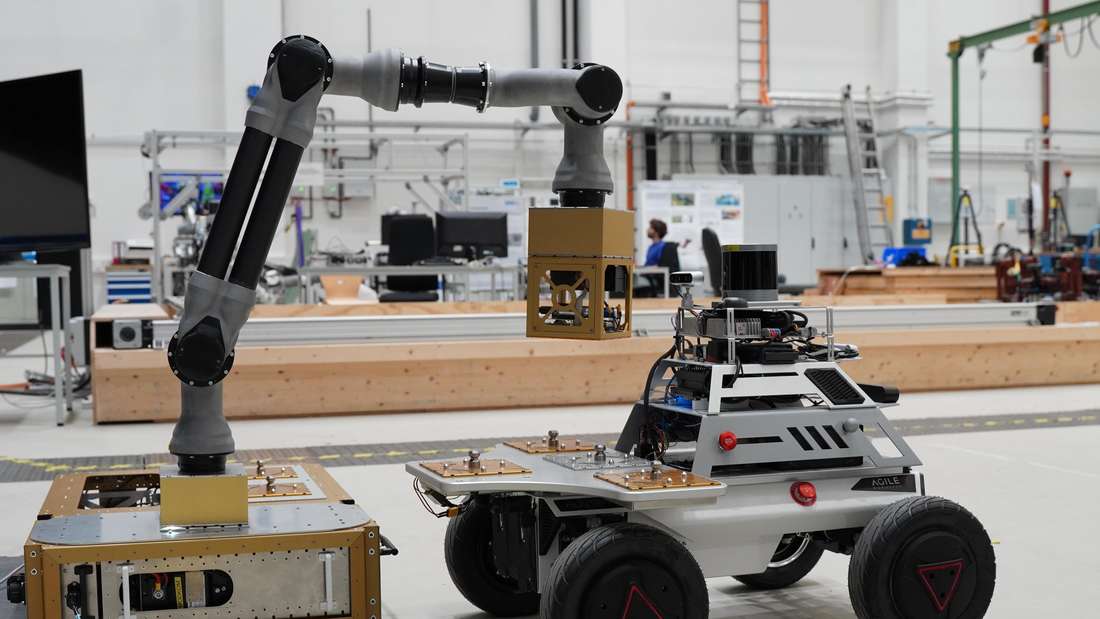 Erfolgreich demonstriert: Der am DFKI entwickelte modulare Manipulatorarm übergibt das Nutzlastmodul über eine multifunktionale Schnittstelle an den Rover Hunter SE. © privat
Erfolgreich demonstriert: Der am DFKI entwickelte modulare Manipulatorarm übergibt das Nutzlastmodul über eine multifunktionale Schnittstelle an den Rover Hunter SE. © privat
Bremer Forscher entwickeln ein Baukastensystem, mit dem sich Weltraumroboter an unterschiedliche Szenarien anpassen lassen. Das ist nachhaltig und reduziert den Weltraumschrott.
Die Entwicklung von Weltraumrobotern erfolgt bislang meist missionsspezifisch. Und das ist ein kosten- und zeitintensiver Prozess, der durch fehlende Wiederverwendbarkeit auch zur Entstehung von Weltraumschrott beiträgt. Ein Wissenschaftlerteam des Deutschen Forschungszentrums für Künstliche Intelligenz (DFKI) und der Universität Bremen hat jetzt ein modulares Baukastensystem entwickelt, mit dem sich robotische Systeme flexibel an unterschiedliche Einsatzszenarien anpassen lassen. „Das System markiert einen Paradigmenwechsel in der Raumfahrtrobotik hin zu effizienteren, robusteren und langlebigeren Technologien“, sagt eine Sprecherin des DFKI.
Mit dem Projekt Modkom („Modulare Komponenten als Building Blocks für anwendungsspezifisch konfigurierbare Weltraumroboter“) wollen das DFKI Robotics Innovation Center und die Arbeitsgruppe Robotik der Universität Bremen – beide unter Leitung von Prof. Dr. Frank Kirchner – einen wichtigen Beitrag zu einem grundlegenden Wandel in der robotischen Raumfahrt leisten, heißt es. Ziel ist es, von starren Einzelentwicklungen weg und zu flexibel rekonfigurierbaren Systemen hinzukommen. Gefördert durch die Raumfahrtagentur im Deutschen Zentrum für Luft- und Raumfahrt (DLR) mit 3,2 Millionen Euro aus den Töpfen des Bundeswirtschaftsministeriums entwickelten die Partner ein Baukastensystem für robotische Weltraumtechnologien.
3,2 Millionen Euro aus dem Bundeswirtschaftsministerium
Das Baukastensystem umfasst weiteren Angaben zufolge sämtliche erforderlichen Hardware- und Softwarekomponenten für den flexiblen Aufbau mobiler Roboter. Die Forscher unterteilen diese in verschiedene Granularitätsebenen, so die DFKI-Sprecherin. „Auf der untersten Ebene stehen Grundelemente wie Gelenke, Strukturelemente und Elektronikbausteine, die über standardisierte Schnittstellen miteinander verbunden werden können.“ Diese Basiseinheiten ließen sich zu Subsystemen kombinieren, die auf höheren Ebenen als modulare Funktionseinheiten in das Baukastensystem integriert seien.
Auf der höchsten Ebene wiederum entstehen daraus – etwa durch die Verbindung stationärer oder mobiler Plattformen mit Sensoren, Nutzlastcontainern oder Manipulatoren – komplette Systeme. „Eine übergreifende Softwarearchitektur erlaubt es, die Systembausteine dynamisch nach dem Prinzip „Plug and Play“ während der Laufzeit einzubinden“, sagen die Wissenschaftler. „Die entwickelten Schnittstellen ermöglichen zudem den Einsatz von Lern- und Optimierungsverfahren, mit denen sich automatisch optimale Hardware- und Softwarekonfigurationen generieren und einzelne Module anpassen lassen.“
Auf der höchsten Ebene entstehen komplette Systeme
„Eine übergreifende Softwarearchitektur erlaubt es, die Systembausteine dynamisch nach dem Prinzip „Plug and Play“ während der Laufzeit einzubinden“, sagen die Wissenschaftler. „Die entwickelten Schnittstellen ermöglichen zudem den Einsatz von Lern- und Optimierungsverfahren, mit denen sich automatisch optimale Hardware- und Softwarekonfigurationen generieren und einzelne Module anpassen lassen.“
Die im Projekt gewonnenen Erkenntnisse und Technologien jedenfalls sollen eine wichtige Grundlage für die Weiterentwicklung rekonfigurierbarer Weltraumroboter bilden. Sie sollen künftig in reale Weltraummissionen einfließen und dazu beitragen, die Flexibilität, Effizienz und Nachhaltigkeit robotischer Raumfahrtsysteme deutlich zu verbessern, teilt das DFKI mit.