Il y a peu, des chercheurs étasuniens ont lancé un
framework d’exosquelette open source gratuit baptisé OpenExo.
L’objectif ? Faciliter et accélérer le développement des
exosquelettes. D’ordinaire, le processus de développement d’un
exosquelette est long et coûteux mais avec OpenExo, les choses
deviennent beaucoup plus abordables.
Casser les barrières du développement
Les innovations autour des exosquelettes font régulièrement
l’objet de publication dans les médias scientifiques. Citons par
exemple l’AwalkHS, développé par la société étasunienne
Seeppo. Décliné en trois modèles, cet exosquelette est un
amplificateur de mobilité au quotidien covenant
aux trajets domicile-travail et aux sentiers faciles, permet le
port de charge d’une masse 70 kg maximum et convient aux personnes
à mobilité réduite.
D’une manière générale, le processus de développement d’un
exosquelette est plutôt long et coûteux, depuis la conception à la
mise en œuvre, en passant par la nécessité d’une certaine
diversité en termes d’expertise. Afin de minimiser ces
différents obstacles, l’équipe du laboratoire de biomécatronique de
Zach Lerner, un chercheur de la Northern Arizona University
(États-Unis) a lancé OpenExo. Il s’agit d’un framework
complet et open source d’exosquelettes modulaires et
autonomes, disponible via une publication dans la revue
Science Robotics datant de juin 2025.
Selon le responsable du projet, le framework livre des
informations permettant la construction d’un exosquelette
mono ou multi-articulaire. Le document inclut le code, des
fichiers de conception ainsi que des guides étape par étape. Citons
également la présence d’indications concernant les logiciels, le
matériel et l’électronique nécessaires à la fabrication de l’engin.
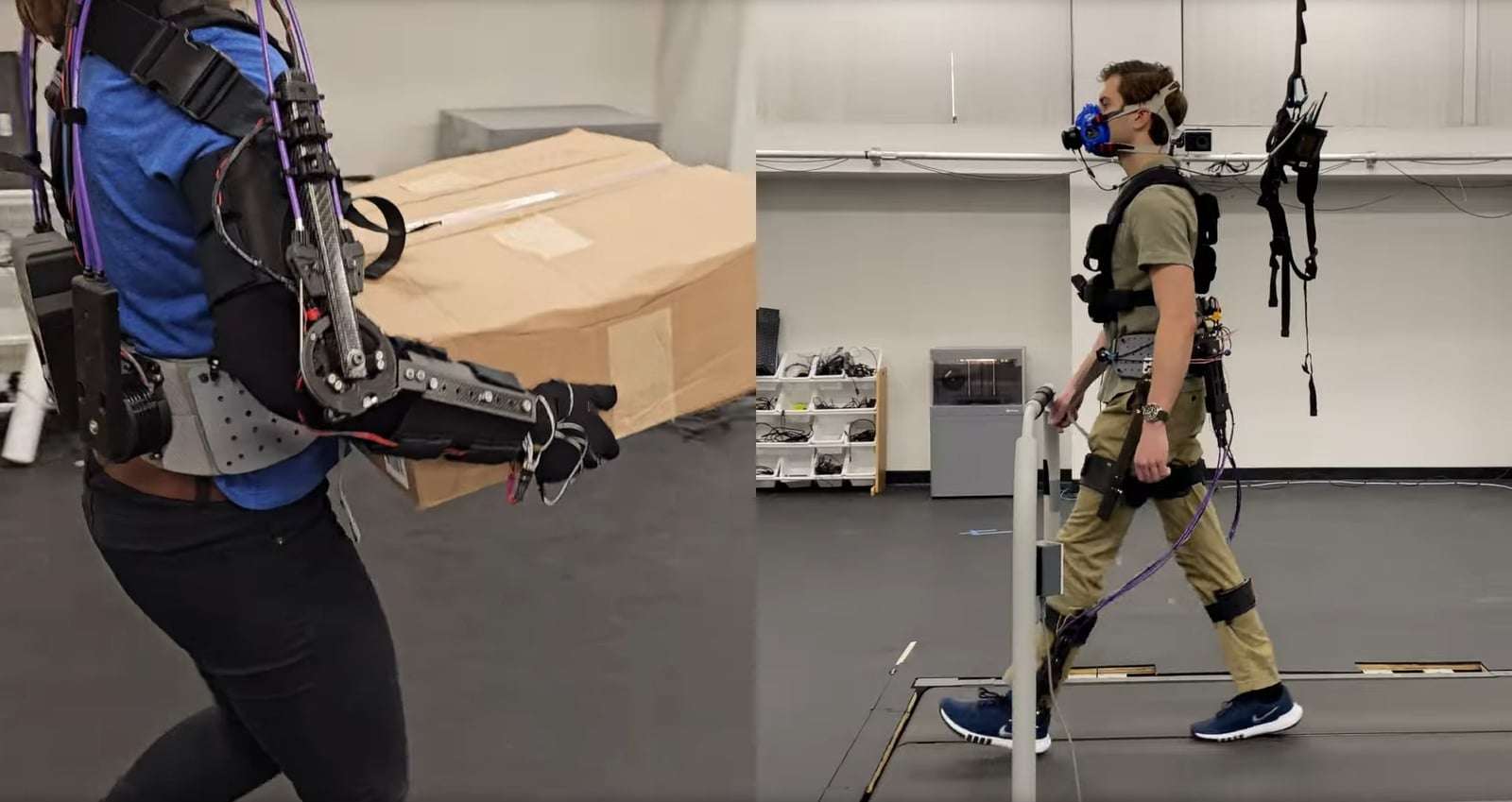
Zach Lerner indique aussi avoir procédé à des tests de
validation expérimentaux sur banc d’essai intégrant le
système dans différentes configurations, par exemple la hanche
seule ou encore, la hanche et la cheville ensemble.
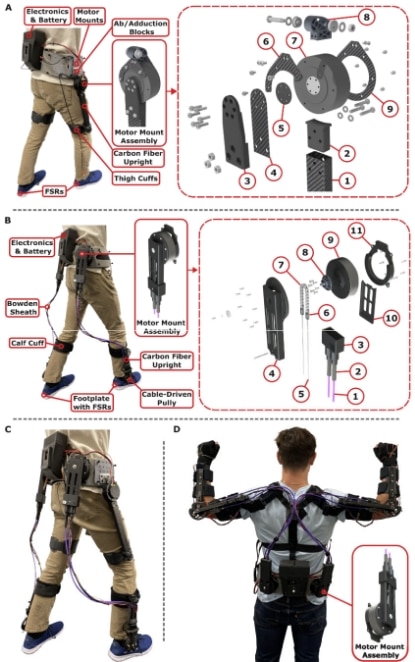
Capture obtenue via le principal fichier du framework OpenExo (PDF en anglais
/ 23 pages). Crédits : OpenExo / Zach LernerUn document clair et accessible au plus grand nombre
Le framework a été pensé pour une accessibilité aux
personnes ne possédant pas toutes les connaissances
nécessaires habituellement pour le développement d’un exosquelette.
Cependant, le document se destine également aux chercheurs
expérimentés et intéressés par un développement libre, sans
contraintes. Par ailleurs, il faut savoir que les quatre
sous-systèmes que sont le matériel, les logiciels, l’électronique
et les commandes sont détaillés précisément et de manière bien
distincte, afin de permettre une meilleure compréhension
des étapes à réaliser. Citons aussi la présence
d’informations relatives à une application Python complémentaire,
en vue d’un fonctionnement plus facile de l’exosquelette.
« Notre projet est important pour la communauté
scientifique, car il réduit considérablement les barrières à
l’entrée […] À une époque où les subventions fédérales diminuent,
les systèmes open source sont devenus de plus en plus essentiels
pour faciliter la recherche de pointe sur la rééducation assistée
par robot et l’augmentation de la mobilité. », a déclaré
Zach Lerner.
Malgré un intérêt grandissant pour le domaine des exosquelettes
ces dernières années, les projets restent tout de même
assez rares en raison des multiples difficultés
mentionnées plus haut. Avec le projet OpenExo, Zach Lerner entend
bien encourager les scientifiques et autres amateurs à se lancer
vers de nouveaux modèles et schémas de contrôle mais aussi,
explorer de nouvelles pistes de recherche. Par
ailleurs, l’importance d’ l’open source est indéniable, dans un
contexte de diminution des subventions – notamment aux États-Unis –
pour la recherche de pointe dans le domaine des exosquelettes et
l’augmentation de la mobilité en général.