Researchers at the University of Cincinnati have developed a flapping-wing drone that can locate and hover around a moving light source like a moth drawn to a flame.
The project, led by UC College of Engineering and Applied Science Assistant Professor Sameh Eisa, could pave the way for small, efficient drones used in covert surveillance.
Eisa and his aerospace engineering students say the secret lies in mimicking insect flight. “The reason we’re interested is size. It’s a more optimal design. These small robots would have to fly like a moth,” Eisa said.
Moths and other hovering insects can maintain their position midair or even fly backward. They instinctively adjust to wind and obstacles with precision.
Eisa’s drone does the same, making constant fine adjustments to maintain distance and orientation from a light, even when that light moves.
Eisa’s lab, the Modeling, Dynamics and Control Lab, focuses on animal-inspired engineering. In earlier research, his team studied drones that could use dynamic soaring like albatrosses to fly longer distances efficiently.
The new mothlike drone takes inspiration from insects’ agile hovering, which Eisa and doctoral student Ahmed Elgohary describe using a mathematical framework known as extremum-seeking feedback.
In their study, the researchers propose that hovering insects use similar natural feedback systems.
“Our simulations show that extremum-seeking control can naturally reproduce the stable hovering behavior seen in insects, without AI or complex models,” said Elgohary, the study’s lead author.
He added that the system relies on “a simple feedback, model-free and real-time principle” that may explain how small creatures fly so nimbly with limited brainpower.
Real-time control without AI
Unlike traditional drones that rely on GPS or artificial intelligence, this flapper drone adjusts its flight in real time by constantly measuring its performance.
The system optimizes for a target, in this case light, through continuous feedback.
Each wing flaps independently to control roll, pitch, and yaw. To the naked eye, the fast wingbeats appear as a blur, similar to a hummingbird’s wings.
The drone’s feedback loop allows it to hover steadily, even replicating the subtle sway seen in moths, bumblebees, dragonflies, hoverflies, craneflies, and hummingbirds.
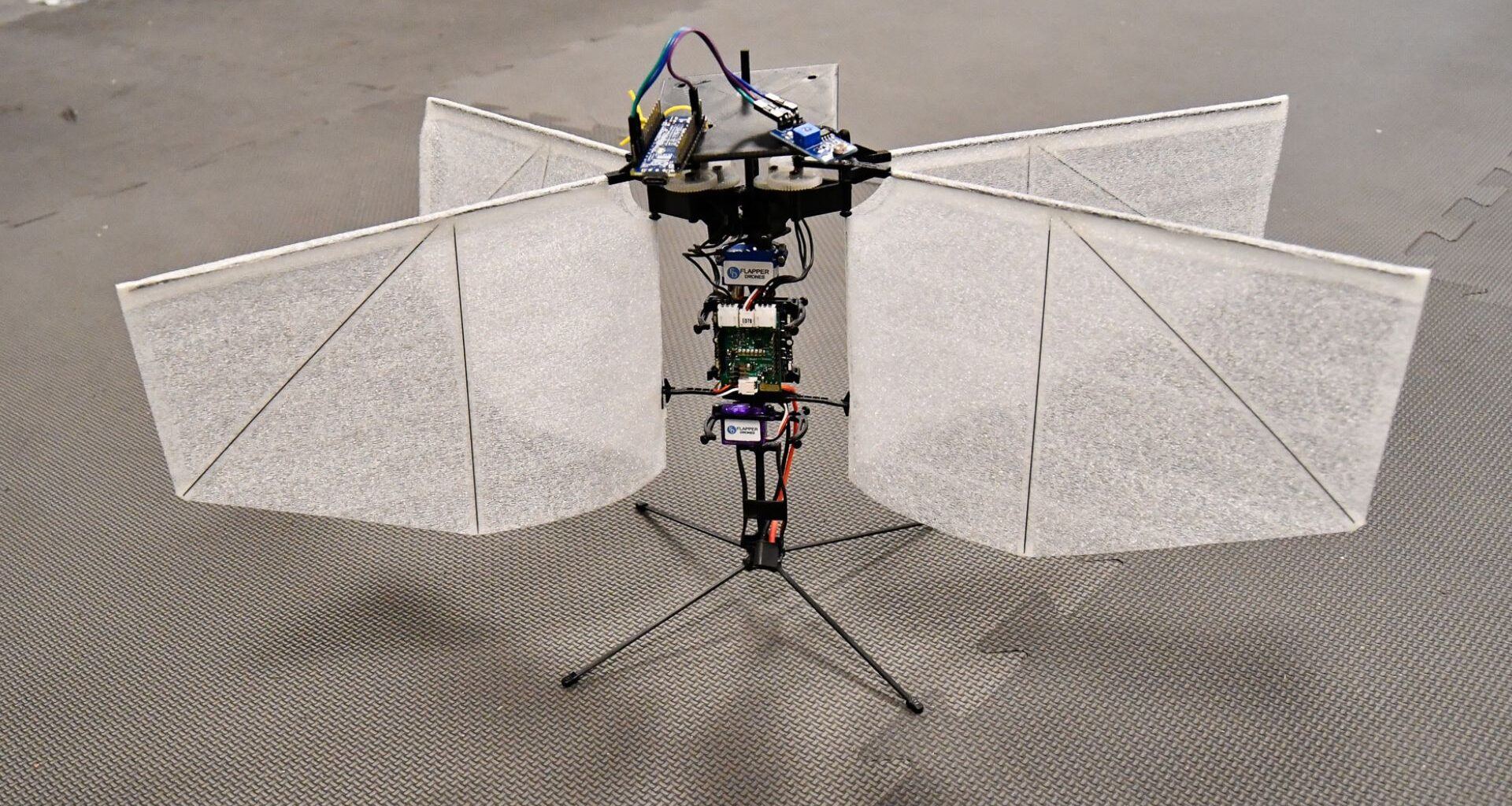
Elgohary and UC graduate student Rohan Palanikumar demonstrated the drone in Eisa’s flight lab, a netted space that protects both the machine and its operators.
The four-winged drone, made from wire and fabric, can lift off and hold its position using the extremum-seeking system. Manual control, Elgohary said, is much harder and less stable.
The wobble observed during flight isn’t a flaw. It’s part of the process. Those small oscillations help the drone assess performance and make micro-adjustments for stability and direction.
Lessons from nature’s engineers
Hovering insects like the hummingbird clearwing moth move their wings in a figure-eight motion, generating lift on both strokes.
Their flexible wings deform with each beat, giving them remarkable control and agility, a principle UC engineers are now translating into robotic design.
Eisa believes the implications go beyond drones. “It could change a lot of things about biophysics,” he said. “If it is the case that hovering insects like moths use the equivalent of our extremum-seeking feedback, it probably evolved in other creatures as well.”
By studying nature’s smallest flyers, UC researchers are uncovering how precision and stability emerge from simplicity, revealing lessons that could transform both drone technology and the understanding of flight itself.
The study is published in Physical Review E.